Codeybot es una nueva propuesta que sumamos a la lista de juguetes robóticos para enseñar a los niños a programar, que compartimos el mes pasado.
Es un pequeño robot que cuenta con una serie de funciones para que los pequeños aprendan programación creando diferentes escenarios. Puede desplazarse, bailar, mostrar diferentes expresiones, reproducir música, entre otras funciones.
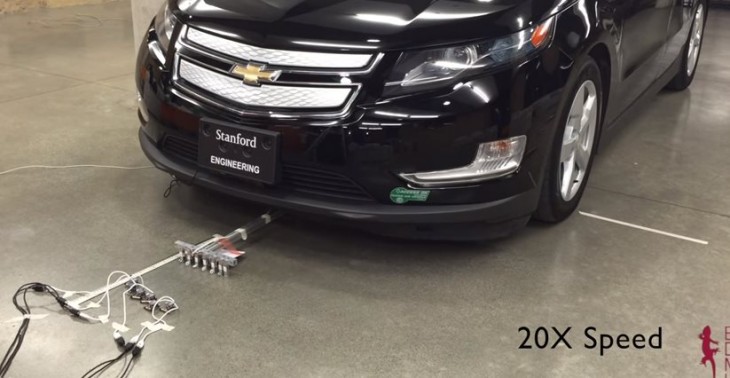
Seis robots de 70 gramos cada uno imitando el comportamiento de hormigas para mover un objeto mucho más pesado que ellos mismos. Eso es lo que han conseguido en la Universidad de Stanford, y el vídeo que os dejamos abajo muestra la proeza.
Las personas solemos adquirir la capacidad de coger objetos con nuestras propias manos desde los pocos años de edad pudiendo sortear las posibles dificultades que se nos puedan presentar en el entorno real en el que nos encontremos sin que ello pueda suponer un problema. Sin embargo, los robots sí que lo tienen más difícil a la hora de coger objetos en el mundo real, existiendo una brecha en comparación con el dominio que tenemos las personas gracias a nuestras capacidades motoras.
Un equipo de investigación de Google se ha propuesto comenzar a cerrar esa brecha mediante el uso de un sistema de red neuronal profunda que permite a los robots recibir entrenamiento continuo para adquirir capacidades inteligentes para el agarre de objetos cotidianos en el mundo real atendiendo al entorno que les rodea, pudiendo predecir el resultado en base a la imagen captada por una cámara y el movimiento del propio motor. Continúa leyendo «Google usa máquinas de aprendizaje para entrenar robots a coger objetos»
Un grupo de estudiantes universitarios ha colaborado con el Grupo Volvo y la empresa de reciclaje de residuos Renova, para crear un robot controlado por un dron capaz de identificar y vaciar contenedores de basura. El proyecto forma parte de ROAR (Robot-based Autonomous Refuse handling), y consta de un robot unido a la parte trasera de un camión de basura. En la parte superior del vehículo hay un dron que detecta el contenedor y avisa al robot sobre su posición, momento en el cual, usando LIDAR, GPS, cámaras y otros sensores, irá directo al contenedor y lo vaciará tal y como se muestra en el vídeo inferior, mientras el conductor controla todo desde el camión. Continúa leyendo «Robots que recogen la basura guiados por drones»
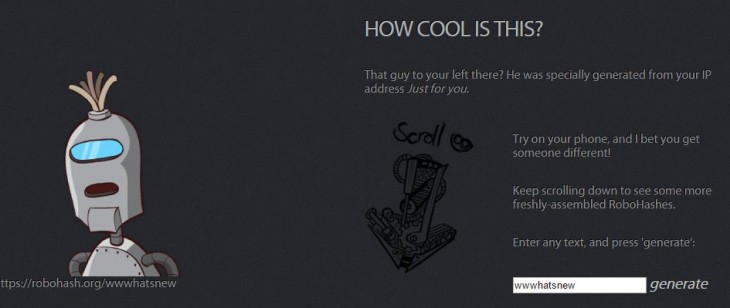
Hablamos de robohash en 2011, hace ya cinco años, pero hemos decidido recupararla del baúl de los recuerdos al comprobar que ha mejorado bastante desde entonces.
Se trata de una aplicación que permite generar imágenes de robots de forma aleatoria. Solo tenemos que introducir una palabra o secuencia de caracteres y pulsar en el botón para ver lo que ha generado, existiendo un número ilimitado de opciones: no hay dos robots iguales. Continúa leyendo «robohash, aplicación que transforma palabras en robots»
¿Cómo manda un saludo de Feliz Navidad una compañía que desarrolla robots humanoides y animaloides? De la única forma posible: atando a sus «mascotas», adornadas debidamente con una cornamenta de peluche, a un trineo que tiran sin problema con un movimiento tan natural como el de los renos reales.
Boston Dynamics, la empresa de Google/Alphabet que nos tiene acostumbrados a despampanantes videos en YouTube con sus prototipos en acción, ha aprovechado la ocasión para mandar un mensaje de «Felices Fiestas» con un trineo compuesto por tres de sus modelos Spot, uno de los más recientes cuadrúpedos del que ya habíamos visto videopresentación y el cual destaca por llevar en su arsenal una impresionante estabilidad ante movimientos inesperados, fuerza, velocidad y capacidad de carga.
Alphabet, la empresa madre de Google que anunció la creación de Verily hace pocos días (el nuevo nombre de la antigua división de ciencias de Google), se ha asociado con Johnson & Johnson para crear Verb Surgical, una empresa que tiene, como uno de sus objetivos, crear robots de apoyo en cirugías.
La empresa creará plataformas y robots que ayuden en la sala de cirugía a realizar tareas de todo tipo, según indican en la nota. La compañía creada, primera después de la creación de Verily (cuyo CEO es Andrew Conrad) comentó en Wired que tienen pensado trabajar junto a muchas otras industrias del sector farmacéutico, biotecnológico, de dispositivos médicos y de diagnóstico, siendo este primer paso con Ethicon (unidad de dispositivos médicos de Johnson & Johnson) solo un primer paso (en este caso la contribución está más enfocada a la propiedad intelectual). Continúa leyendo «Verily (ex-Google Life Sciences) y Johnson & Johnson crearán robots para cirugías»
Un grupo de analistas del Instituto de Investigación Nomura (NRI) ha llevado a cabo un estudio a partir del cual se concluye que en los próximos veinte años, prácticamente la mitad de los puestos de trabajos existentes en Japón podrían ser ocupados por robots.
El equipo de analistas (liderado por Yumi Wakao) del que os hablamos ha trabajado codo con codo junto al profesor Michael Osborne, de la Universidad de Oxford, que anteriormente investigó sobre el mismo asunto tomando como referencia datos sobre los Estados Unidos y el Reino Unido. En esta ocasión, el equipo del NRI ha examinado más de 600 puestos de trabajo distintos de Japón, llegando a la conclusión de que un 49% de los mismos podrían ser llevados a cabo por robots. Para llegar a esta conclusión, los analistas se han basado en el grado de creatividad requerido para llevar a cabo cada empleo, lo que significa que trabajos como la asistencia técnica, la entrega de envíos o las labores agrícolas serían fácilmente substituibles por máquinas. En cambio, todos aquellos trabajos relacionados con el mundo de la escritura o de la enseñanza serán difícilmente sustituidos por mano de obra artificial en el corto plazo.
A modo de conclusión puede resultar interesante comparar los resultados de Japón con los de los Estados Unidos y el Reino Unido. Mientras que tal y como ya hemos indicado, se espera que un 49% de los trabajos de Japón puedan ser desempeñados por robots en el año 2035, esta cifra se reduce a un 47 y un 35% para los Estados Unidos y el Reino Unido, respectivamente. Sin duda, estamos ante cifras de lo más sorprendentes, aunque no debemos olvidar que se trata de cálculos hipotéticos.
Si ayer os hablábamos del robot que iban a comenzar a probar en el aeropuerto de Schiphol (Amsterdam) para evitar que los viajeros se pierdan en las instalaciones del aeropuerto, hoy os hablamos de una técnica desarrollada por la profesora asociada de la Universidad Brown Stefanie Tellex, que ha logrado que los robots se enseñen entre ellos cómo coger objetos de la forma apropiada.
Stefanie Tellex ha trabajado en su proyecto con dos unidades de Baxter, robots industriales con dos extremidades y una pantalla táctil por cabeza. Es importante tener en cuenta que el objetivo del proyecto de Tellex es conseguir que el primer robot aprenda cuál es la forma adecuada de coger y sostener distintos objetos, para posteriormente transmitir sus conocimientos al segundo robot. Para ello, Baxter cuenta con una serie de cámaras y sensores infrarrojos con los que examinar el objeto que tiene frente a él. Una vez lo ha observado desde distintos ángulos, comienza a probar varias formas de cogerlo y sostenerlo hasta encontrar la adecuada y asegurarse de que no hay peligro de que se caiga. Se trata de un proceso algo tedioso, ya que puede requerir docenas de intentos hasta encontrar la forma perfecta. En cuanto encuentra la forma más adecuada, la información se codifica en un formato que puede compartirse online, actualizándose automáticamente en el resto de robots. Según la fuente, los robots consiguen coger cualquier objetos con una precisión un 75% mayor al hacer uso de la técnica de Stefanie.
Sin duda, estamos ante un proyecto de lo más interesante. El objetivo final es que las empresas puedan utilizar esta técnica para enseñar a cientos o miles o millones de robots industriales cómo sostener y transportar sus productos en fábricas o almacenes. A pesar de que llevaría un tiempo aprender una tarea en concreto, el robot la compartiría instantáneamente con decenas y cientos de robots instantáneamente.
A continuación, os dejamos con un vídeo de los robots:
Ya os hemos hablado con anterioridad acerca de distintas mejoras relacionadas con el mundo de la robótica. Hoy es el turno Spencer, un robot cuya misión es asegurarse de que los pasajeros no pierden su vuelo por no saber hacia dónde dirigirse dentro del aeropuerto.
Estamos ante una iniciativa de la aerolínea KLM, aunque el proyecto ha sido llevado a cabo gracias a la contribución de investigadores de la í–rebro University (Suecia). Además, han contado también con la colaboración de investigadores y empresas de cinco países distintos, y no hay que olvidar ha sido financiado por la Comisión Europea. El objetivo del proyecto es colocar el robot en el aeropuerto de Schiphol (Amsterdam), uno de los más complicados a la hora de desplazarse de un lugar a otro. Si nos centramos en las principales características por las que destaca Spencer, el robot está equipado con un mapa completo del aeropuerto de Schiphol, incluyendo información acerca de obstáculos de todo tipo (como paredes o escaleras). Además, puede determinar las distancias a los distintos elementos ubicados a su alrededor gracias a su tecnología de láseres, por lo que también es capaz de desplazarse sin obstaculizar a los viajeros. Y no solo eso, ya que sus creadores afirman que está programado para comprender el comportamiento y la forma de desplazarse de las personas. De hecho, ha sido diseñado para ser consciente de las personas que se encuentran a su alrededor: en caso de estar ayudando a un grupo de personas sabrá si alguna se ha despistado y separado del grupo.
A partir del próximo día 30, el aeropuerto de Schiphol probará durante una semana el funcionamiento de Spencer. Esto servirá para analizar el comportamiento del robot en un entorno real y corregir los posibles inconvenientes encontrados. Por ejemplo, sus creadores afirman que puede tener problemas con objetos abandonados temporalmente en las inmediaciones (como maletas), ya que dificultan la tarea de analizar el entorno y su localización. Se espera que la versión definitiva de Spencer esté operativa de forma oficial en marzo del próximo año.