Así lo presentan en IEEE, un robot desarrollado por el MIT que es capaz de imitar los movimientos de un humano para repetirlos usando una fuerza mucho mayor.
Se trata de HERMES, 45 kilos de robot bípedo con un tamaño muy parecido al humano, conectado con sensores a un exoesqueleto para que sea posible imitar los movimientos, sin autonomía, sin inteligencia, únicamente una «masa de músculos de acero» que usa el cerebro humano para moverse. Continúa leyendo «Un robot al que «prestamos nuestro cerebro» para que se mueva»
Como sabréis, en WWWhatsnew os hablamos con frecuencia acerca de distintos proyectos relacionados con el mundo de la robótica. En esta ocasión, nos ha llamado la atención uno de lo más recientes experimentos de los investigadores del MIT, que han creado un robot capaz de plegarse por si mismo a partir de una fina lámina de plástico, caminar, transportar cargas y nadar.
El robot del que os hablamos pesa tan solo 0,3 gramos y funciona mediante electroimanes. Como ya hemos mencionado, una de las características principales que más llama la atención acerca del robot es su capacidad de plegarse sobre si mismo, ya que en su estado general, es simplemente una fina lámina de plástico. Una vez plegado, puede desplazarse por cualquier superficie (incluso sobre la piel), transportar cargas hasta el doble de su peso (en el vídeo podemos ver que carga con un objeto de 0,6 gramos), subir pendientes y nadar. Además, el robot está preparado para ser disuelto por completo en acetona una vez ha terminado su trabajo. Por ahora, el robot está hecho de plástico, aunque los investigadores responsables del proyecto afirman que podría fabricarse a partir de materiales biodegradables. Es importante tener en cuenta que por el momento, el robot es tan solo un prototipo, por lo que todavía hay mucho margen de mejora por delante.
A continuación, os dejamos con un breve vídeo en el que se muestra el funcionamiento del robot:
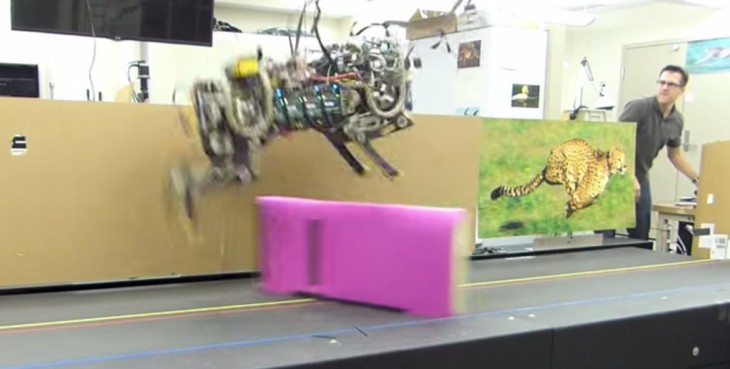
Desde el Massachusetts Institute of Technology llega ahora el vídeo que os dejamos abajo, mostrando cómo se está avanzando a la hora de imitar los movimientos de los animales en el campo de la robótica.
Como veis, actúa como un guepardo, corriendo y saltando obstáculos de una forma bastante natural y de forma autónoma, aunque aún están lejos de conseguir las velocidades del animal. El nuevo robot llega a velocidades algo inferiores a 10 km/h, aunque lo sorprendente es que usa tres algoritmos diferentes para permitir que el robot escanee su entorno, detecte objetos y calcule sus saltos al mismo tiempo que corre, todo en menos de 100 milisegundos. Continúa leyendo «El nuevo robot del MIT no solo corre, también salta obstáculos»
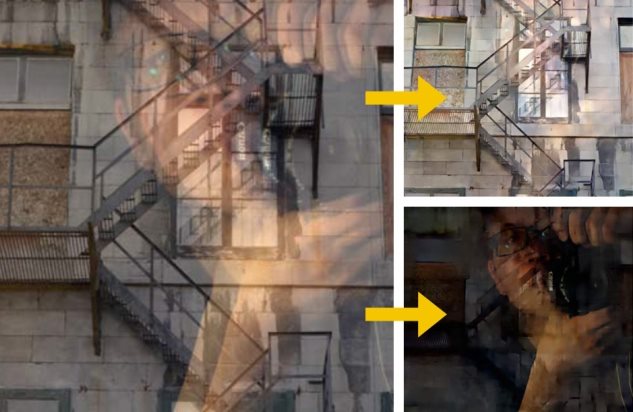
Hay muchas formas de reducir el reflejo de imágenes cuando hacemos una fotografía a través de una ventana, pero poco podemos hacer una vez que el reflejo ha sido capturado por la cámara.
En eso precisamente han estado trabajando en el MIT, en un algoritmo que identifique el reflejo y lo separe de la imagen de fondo, eliminándolo de la fotografía ya realizada, algo que podría tener una importancia enorme en el mundo periodístico, cuando la imagen muchas veces se captura cuando no hay tiempo para prepararse de forma adecuada.
En su web vemos los detalles, donde YiChang Shih, el líder del proyecto, informa que para que el algoritmo funcione, la ventana tiene que tener doble vidrio, como aquellas que reducen el ruido exterior. Eso es necesario, ya que cada uno de los vidrios produce un reflejo diferente, y es esa información la que usan para poder recomponerla y eliminarla posteriormente. También funcionaría con vidrios muy gruesos, suficientemente gordos como para que cada cara genere un reflejo distinto.
Están pensando en vender la tecnología a fabricantes de cámaras, por lo que es posible que en futuras generaciones de móviles veamos cómo se elimina el reflejo de forma automática y, seguramente, en tiempo real.
En WWWhatsnew ya os hemos hablado en anteriores ocasiones acerca de distintos proyectos en los que trabajan en el MIT (Instituto Tecnológico de Massachusetts), como la impresora 3D para imprimir helado o el robot capaz de localizar droga escondida en el casco de los barcos. En esta ocasión os hablamos de NailIO, un pequeño trackpad de reducido tamaño que podría ser utilizado desde la uña de tu dedo pulgar.
Los estudiantes responsables del proyecto afirman que su objetivo es que NailIO sea de utilidad a la hora de controlar dispositivos como ordenadores, smartphones y tablets en todos aquellos momentos en los que tengamos las manos ocupadas, independientemente de que sea cocinando o realizando cualquier otra tarea. Centrándonos en el producto, NailIO es un pequeño dispositivo wearable capaz de aprovechar las posibilidades de los dedos y la tecnología presente en los trackpads para controlar nuestros dispositivos desde la uña del dedo pulgar. Para ello, NailIO cuenta con un procesador, una pequeña batería y conectividad Bluetooth gracias a la cual es capaz de enviar datos de forma inalámbrica. De esta forma, una vez colocado sobre la uña será posible controlarlo mediante gestos realizados con el dedo índice, pudiendo, por ejemplo, desplazarte por el contenido de una página web mientras estás cocinando. Además, los estudiantes responsables de su desarrollo ofrecen la posibilidad de personalizar el acabado del dispositivo con distintos diseños, adaptándose así a los gustos estéticos de cada usuario.
Sin duda alguna, se trata de un dispositivo que podría tener un gran potencial por explotar. De ahora en adelante, en el MIT esperan continuar mejorando las características de NailIO, reduciendo su tamaño y aumentando la duración de la batería. A continuación, os dejamos con un vídeo en el que se muestra el funcionamiento del dispositivo:
Al parecer, tal y como podemos leer en The Verge, Twitter ha decidido colaborar con el MIT ofreciendo a estos últimos acceso a todos los tweets públicos publicados en la popular red social de microblogging desde el día de su lanzamiento. El objetivo es estudiar la forma en la que los usuarios comparten información y buscar patrones de conducta, trabajo por el cual este grupo de investigadores del MIT recibirá 10 millones de dólares.
Como decimos, el objetivo es realizar enormes cantidades de estadísticas y analizar toda la información recopilada, dentro de la cual se incluirán todos los tweets publicados en la red social. Para ello, el equipo de investigadores del MIT trabajará bajo un departamento conocido como «Laboratorio de Máquinas Sociales». Por el momento, la información que se tiene sobre este asunto es más bien escasa, aunque todo parece indicar que la idea es sacar conclusiones generales de la enorme cantidad de información publicada en Twitter. Además, el MIT ha confirmado la creación de nuevas plataformas tanto para individuos como para instituciones con las que identificar, discutir y actuar acerca de problemas sociales de toda índole. En concreto, uno de los intereses particulares es comprender por qué en muchas ocasiones las opiniones en Twitter no fomentan un cambio en aspectos importantes. El objetivo final de todo esto sería comprender en profundidad la repercusión de la información compartida en la red social y la forma en la que afecta a otros usuarios de la misma.
Malas noticias para quienes anhelábamos disponer pronto de los flamantes coches autónomos en los que viene trabajando Google. Y no, poco tiene que ver con impedimentos sociales o legislaciones que pudieran detener su desarrollo -por ejemplo ahora están obligados a incluir volante y pedales en sus pruebas-, el problema sorprendentemente está en el trabajo técnico que queda en un segundo plano para los ciudadanos del común al ver los videos promocionales del proyecto pero que científicos del MIT y Chris Urmson, director del Google car team, se han encargado de revelar y explicar para aterrizarnos en la realidad.
Aunque los coches de Google sobresalen frente a otros proyectos de carros autónomos en sus capacidades para responder a situaciones críticas como un atascamiento o a algún objeto fácilmente notable en la vía -incluso nuevas señales de tránsito como las que se ponen en construcciones-, por ahora su funcionamiento correcto es garantizado únicamente en espacios altamente controlados, con datos detallados de mapas, calzadas y vías que no cambien a lo largo del trayecto.
Fuera de eso, las limitaciones son bastantes: Problemas en desestabilizaciones del terreno como el que podría causar una fuerte lluvia o una tormenta de nieve, complicaciones al distinguir luces de semáforo en presencia de fuerte luz solar, poca destreza al acomodar el carro en un parqueadero de mí¹ltiples pisos, problemas al detectar peatones o su relevancia específica -como la de un oficial de tránsito-, detectar y sortear obstáculos únicamente rodeándolos -comentan que no podría notar una alcantarilla destapada si no está señalizada- entre otros detalles vitales.
En el artículo del MIT se menciona a fondo su poca factibilidad en casi el 99% del territorio específicamente de Estados Unidos, pero si tenemos en cuenta su buena infraestructura de vías de las que pocos países en todo el mundo disponen, no es complicado extrapolar los resultados a las demás latitudes siendo las condiciones y necesidades de los usuarios tan parecidas. De nuevo, mucho falta para tener rodando con todas las de la ley a estas tremendas máquinas; Claro, las soluciones llegarán, pero lastimosamente varios años faltan para ello.
Sam Felton, un estudiante de la Universidad de Harvard ha creado, junto con algunos miembros del MIT, un robot capaz de plegarse y desplegarse por si solo, sin intervención humana.
Sus creadores pretendían fabricar un robot que fuese fácil de construir y perfectamente asequible, por lo que para ello han utilizado materiales corrientes. La idea de su funcionamiento está basada sobre todo en las asombrosas figuras que se pueden lograr con el origami, el arte japonés que permite crear complejas figuras hechas únicamente de papel. Además, se fijaron también en las formas y movimientos que podemos encontrar en la naturaleza, como por ejemplo, el modo en el que el capullo de una flor se despliega. El robot está fabricado principalmente en papel y, para adquirir su forma, genera calor de forma autónoma, consiguiendo de este modo que el papel recupere su forma. Una vez la ha recuperado (en apenas unos segundos) puede comenzar a desplazarse por si mismo. Sus desarrolladores aseguran que todavía queda mucho trabajo por delante, pero, sin duda alguna, se trata del punto de partida de un proyecto que podría tener un gran potencial e infinitas posibilidades, como la exploración espacial, su uso en campos de batalla, el acceso a lugares inaccesibles…
Os dejamos con un vídeo del mismo para que veáis cómo funciona:
No hay día en el que las novedades del mundo de la ciencia dejen de sorprendernos. En esta ocasión, un grupo de científicos del MIT ha mostrado un sistema por el cual serían capaces de reconstruir un determinado sonido -ya sea una conversación entre personas, una canción, o un discurso- únicamente a partir de las vibraciones que el sonido provoca en los objetos.
Estas pequeñas vibraciones no pueden ser detectadas por el ojo humano, por lo que este grupo de científicos ha utilizado una cámara de alta velocidad con la que se han encargado de grabar un determinado objeto (han probado con una planta, una bolsa de patatas fritas y un vaso de agua) con el objetivo de utilizar posteriormente esta grabación para leer las vibraciones y traducirlas a sonidos. Tal y como podemos ver en el vídeo que os mostramos a continuación, los resultados son alucinantes, y es que a partir del movimiento de las hojas de una planta son capaces de recuperar la música que estaba sonando en un momento determinado. Incluso en situaciones más complicadas, como a la hora de recuperar el sonido a partir de una bolsa de patatas que se encuentra al otro lado de una ventana insonorizada han conseguido recuperar la voz de la persona que hablaba. El sistema funciona tan bien que incluso utilizando una cámara digital tradicional han sido capaces de reconstruir el sonido de una forma más básica.
Si necesitas utilizar gafas para ver la televisión o para trabajar con tu ordenador, es probable que dentro de un tiempo puedas despedirte de ellas. La razón es que un grupo de investigadores del MIT ha desarrollado una tecnología que permitiría alterar cualquier imagen mostrada en una pantalla con el objetivo de que una persona con problemas visuales pudiese verla con claridad sin necesidad de utilizar gafas.
Pero, ¿cómo funciona esta tecnología?
Para lograrlo, se utiliza un filtro de luz fabricado en plástico transparente con miles de pequeños agujeros en su superficie. Este filtro se instalaría en la pantalla del dispositivo que estemos utilizando, independientemente de que se tratase de una tablet o de la pantalla de nuestro ordenador. Posteriormente, un algoritmo sería el encargado de modificar la luz de cada pixel de forma individual, de modo que cuando los rayos de luz provenientes de la pantalla pasen por los pequeños agujeros del filtro, alcanzan la retina del usuario de un modo que permitiría recrear una imagen nítida. Tal y cómo han explicado los responsables del proyecto, la idea es anticiparse al modo en el que nuestros ojos distorsionarán la imagen con el objetivo de ajustarla antes de que esto ocurra. Esta tecnología, que está siendo desarrollada por investigadores del MIT junto a Microsoft, será presentada en la «International Conference and Exhibition on Computer Graphics and Interactive Techniques», que tendrá lugar en Canadá a lo largo del próximo mes.
Por el momento, el proyecto se encuentra en una fase temprana de su desarrollo, pero sus responsables esperan poder tener un prototipo para que pueda ser probado por todo tipo de personas en unos años.