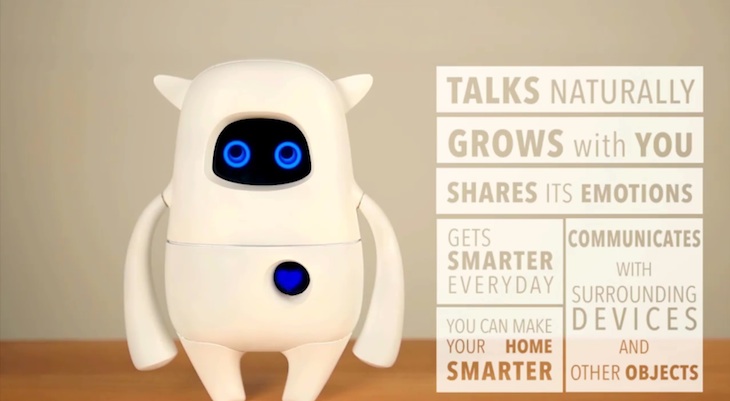
Como sabréis, en WWWhatsnew hablamos con frecuencia acerca de distintas novedades del mundo de la robótica. En esta ocasión, nos ha llamado la atención un robot creado por AKA, una empresa centrada en el aprendizaje de las máquinas y el uso de un lenguaje natural por parte de las mismas. Actualmente, la empresa se encuentra recaudando fondos en Indiegogo para dar vida a Musio, un robot con el que es posible tener conversaciones naturales.
Una de las principales ventajas por las que destaca Musio es por estar diseñado para aprender constantemente, algo posible gracias a la tecnología de aprendizaje profundo (deep learning). El objetivo principal del robot ofrecer asistencia con tareas básicas (como recordarte los eventos de tu calendario), además de servir como herramienta de aprendizaje para los más pequeños de la casa. Gracias a la conectividad inalámbrica será capaz de interactuar con una gran cantidad de dispositivos del hogar, por lo que podrás utilizarlo para controlar el aire acondicionado, las luces, la televisión etc. Además de ello, al estar basado en Android y ser compatible con Arduino podrás programar el robot incluyendo nuevas funciones. Musio se comercializará en tres versiones distintas (Simple, Smart y Genius a un precio de 159, 299 y 599 dólares respectivamente) que se diferencian por las características principales del robot (procesador, batería, capacidad, conectividad, etc), siendo las versiones Smart y Genius más potentes que la Simple. Así, los modelos más caros serán capaces de responder de forma más rápida a nuestras preguntas y mantener conversaciones más naturales, mientras que la versión Simple solo recordará cinco conversaciones anteriores y no contará con conexión a Internet.
Actualmente, Musio se encuentra recaudando fondos en Indiegogo, donde a falta de 35 días restantes ya ha conseguido reunir más de 16.000 dólares de los 50.000 necesarios. A continuación, os dejamos con el vídeo de presentación de la campaña:
Continúa leyendo «Musio, un robot con el que es posible mantener conversaciones empleando lenguaje natural»