
La Universidad Carnegie Mellon ha desarrollado un robot cuadrúpedo capaz de caminar en una barra de equilibrio gracias a un sistema de actuador de rueda de reacción. Este avance podría ser clave para mejorar la estabilización de robots cuadrúpedos y permitir su comercialización en el futuro.
Sistema de actuador de rueda de reacción para robots cuadrúpedos
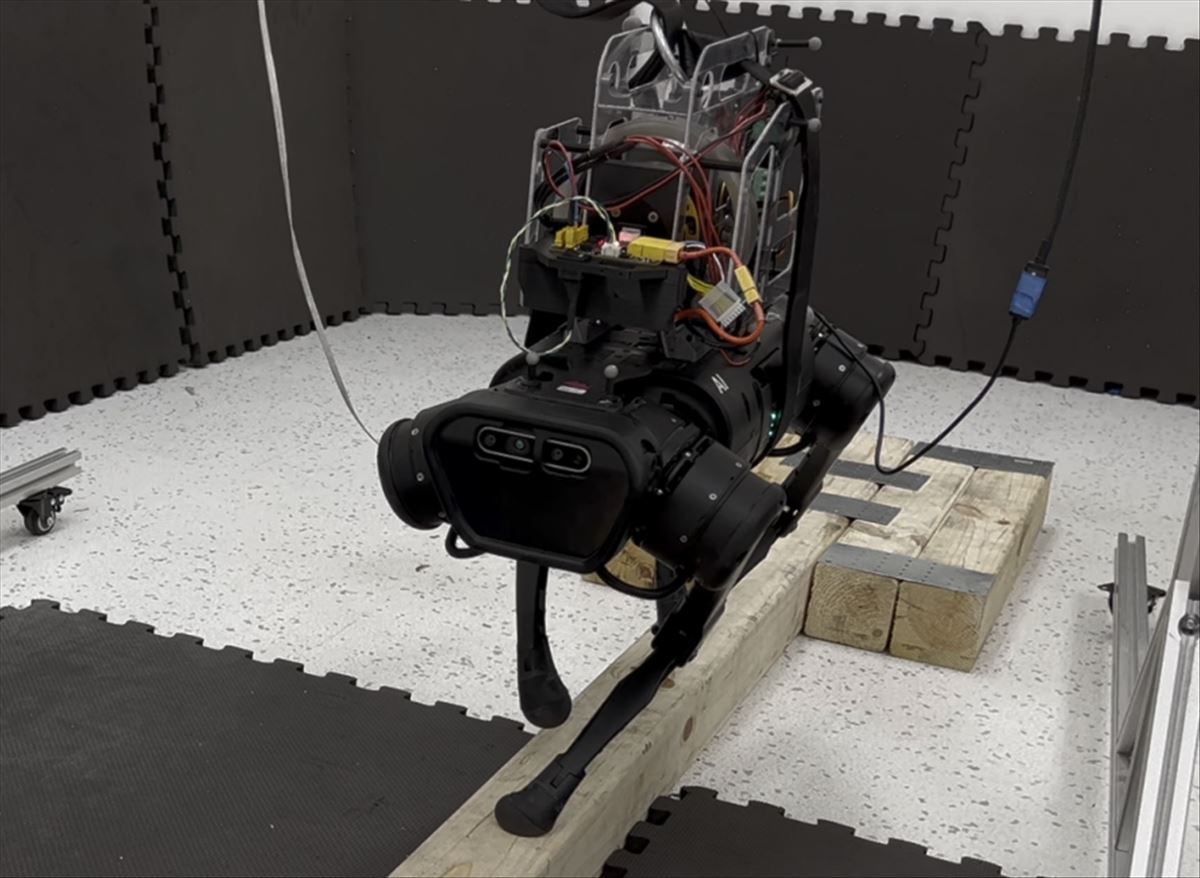
El equipo de investigadores de la Universidad Carnegie Mellon ha utilizado un sistema de actuador de rueda de reacción montado en la parte trasera del robot cuadrúpedo. Gracias a una técnica de control novedosa, el sistema permite al robot mantener el equilibrio de manera independiente, sin importar la posición de sus patas.
Para mejorar las capacidades de equilibrio del robot, los investigadores han utilizado hardware comúnmente utilizado para controlar satélites en el espacio. De esta manera, el robot ha sido capaz de caminar en una barra de equilibrio de 6 centímetros de ancho sin caerse.
Implicaciones comerciales de los robots cuadrúpedos mejorados
El equipo de investigación ha destacado la importancia de mejorar la estabilización de los robots cuadrúpedos para su posible comercialización en el futuro. Los robots cuadrúpedos pueden convertirse en una tecnología de vanguardia en el mercado, tal y como ocurrió con los drones hace una década.
Con la mejora en las capacidades de estabilización y equilibrio de los robots cuadrúpedos, su uso podría expandirse en diferentes campos, tales como la exploración espacial, la vigilancia y el rescate de personas en áreas peligrosas. Los robots cuadrúpedos también podrían ser utilizados en la industria del entretenimiento, la logística y la seguridad.
Simulación del problema del gato que cae
Los investigadores también han llevado a cabo una simulación del problema del gato que cae, dejando caer el robot desde una altura de medio metro mientras se encontraba boca abajo. Gracias al sistema de actuador de rueda de reacción, el robot fue capaz de girarse en el aire y caer de pie, como un felino.
Esta simulación ha demostrado la capacidad del robot cuadrúpedo para corregir su posición en el aire y mejorar su capacidad de equilibrio. Los investigadores han destacado que esta capacidad es crucial para el uso de robots cuadrúpedos en entornos impredecibles y peligrosos.
Este avance también podría tener un impacto significativo en la investigación en robótica y la inteligencia artificial. La mejora en las capacidades de equilibrio de los robots cuadrúpedos podría ser utilizada para desarrollar robots más inteligentes y adaptativos, capaces de aprender de su entorno y tomar decisiones