
Investigadores de la Universidad de Cranfield, en Inglaterra, han creado un robot que se mueve exclusivamente con energía eólica. Se llama WANDER-bot, está fabricado íntegramente con piezas impresas en 3D y no necesita batería para caminar. La idea suena a ciencia ficción low-tech, pero responde a un problema de ingeniería muy concreto: en la mayoría de robots, el movimiento consume alrededor del 20% de la energía total de la batería. Elimina ese consumo y el resto del sistema —cámaras, sensores, transmisores— puede funcionar con baterías mucho más pequeñas y ligeras. O directamente sin batería para locomoción.
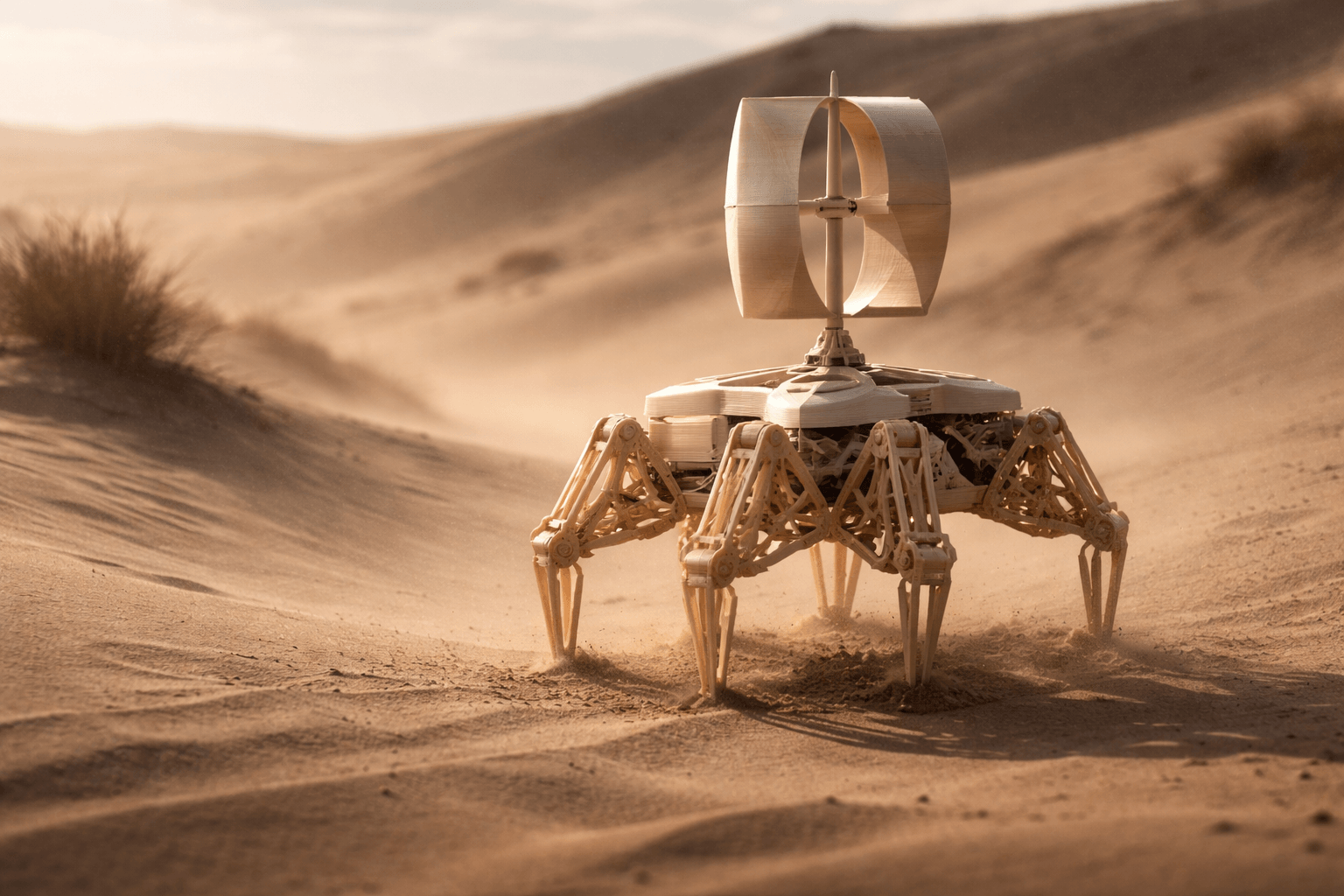
El diseño combina dos elementos que, por separado, existen desde hace décadas. Por un lado, una turbina Savonius —el tipo más simple de aerogenerador, compuesto por dos semicilindros que rotan con viento de cualquier dirección—. Por otro, un mecanismo de Jansen, las patas articuladas inventadas por el artista holandés Theo Jansen para sus célebres Strandbeesten, esas esculturas cinéticas que «caminan» por las playas de los Países Bajos impulsadas por el viento. WANDER-bot conecta una a las otras: la turbina captura el viento y transmite mecánicamente esa energía a las patas, que se mueven sin motor eléctrico, sin servos, sin nada que requiera electricidad.
¿Para qué sirve un robot que solo camina recto con el viento?
Es una pregunta legítima, porque este prototipo tiene una limitación obvia: todavía no puede girar. Camina en la dirección del viento y punto. No esquiva obstáculos, no elige ruta, no toma decisiones de navegación. El propio equipo de Cranfield —el Dr. Saurabh Upadhyay, profesor de ingeniería espacial, y Sam Kurian, investigador asociado— lo reconoce sin rodeos: WANDER-bot es un prototipo de bajo nivel de madurez tecnológica (TRL bajo), presentado como póster en la conferencia ASTRA de la Agencia Espacial Europea en 2025. Su objetivo es demostrar que un robot puede aprovechar la energía eólica para moverse, no resolver la exploración planetaria mañana.
Pero la demostración de principio importa. La exploración de entornos hostiles —desiertos, casquetes polares, superficies planetarias— tiene un cuello de botella persistente: la energía. Las baterías limitan el alcance. Los paneles solares se degradan con el tiempo y dependen de la luz. Los generadores termoeléctricos de radioisótopos (los que alimentan a las sondas Voyager) son carísimos y escasos. El viento, en cambio, es un recurso abundante en muchos de los entornos que más nos interesan: Marte tiene tormentas de polvo que duran semanas. La Antártida es un generador de viento constante. Los desiertos terrestres ofrecen flujos eólicos predecibles.
Un robot que camina con el viento no necesita parar a recargar. No sufre degradación de paneles solares. No depende de un presupuesto de plutonio-238. Puede operar durante meses o años en lugares donde enviar un equipo humano de mantenimiento es imposible. Y al estar fabricado completamente en 3D, sus piezas pueden imprimirse in situ: si una pata se rompe en una tormenta de arena marciana, imprimes otra y la reemplazas. Sin misiones de reabastecimiento. Sin logística costosa. Sin dependencia de piezas de repuesto transportadas desde la Tierra.
El siguiente paso: aprender a girar
El equipo de Cranfield ya está trabajando en la maniobrabilidad. Futuras versiones incluirán mecanismos que permitan a WANDER-bot cambiar de dirección y navegar terrenos más complejos, desde hielo polar irregular hasta dunas cambiantes. También planean integrar sensores ligeros y sistemas de comunicación que funcionen con fuentes de energía mínimas, aprovechando precisamente el ahorro que supone no gastar batería en locomoción.
Es un enfoque que conecta con una tendencia más amplia en robótica: la inspiración biológica aplicada a problemas de ingeniería real. Los robots submarinos inspirados en rayas usan la forma del cuerpo como sistema de propulsión. Los microrrobots del MIT imitan el vuelo de insectos. WANDER-bot copia a una escultura de playa holandesa y le pone una turbina encima. No es elegante, pero funciona. Y en ingeniería, funcionar es lo que importa.
Mi valoración: WANDER-bot no va a explorar Marte el año que viene. Pero el principio que demuestra —locomoción mecánica sin electricidad, fabricación 3D modular, energía renovable integrada— es potente para un nicho específico de exploración robótica. La pregunta real es si la maniobrabilidad puede resolverse sin añadir complejidad eléctrica que anule la ventaja del diseño. Si lo consiguen, tenemos un robot que funciona donde todos los demás se quedan sin batería. Y eso, en exploración espacial, vale más que toda la sofisticación electrónica del mundo.
Preguntas frecuentes
¿Qué es WANDER-bot? Un robot impreso en 3D desarrollado por la Universidad de Cranfield que se desplaza usando energía eólica, sin necesidad de batería para moverse. Combina una turbina Savonius con un mecanismo de patas articuladas tipo Jansen.
¿Puede girar o cambiar de dirección? Todavía no. El prototipo actual solo camina en la dirección del viento. El equipo está trabajando en añadir maniobrabilidad.
¿Se podría usar en Marte? En teoría, sí: Marte tiene viento constante y la fabricación 3D permitiría imprimir piezas de repuesto in situ. Pero el robot está en fase de prototipo temprano (TRL bajo).