
En anteriores artículos hemos hablado acerca de las diferentes alternativas de locomoción que han estado siendo desarrolladas para hacer posible el desplazamiento de los robots, donde destacábamos hace algunos días la iniciativa llevada a cabo por científicos de la Universidad de California con la creación de unos pies flexibles para facilitar la movilidad de máquinas en superficies irregulares.
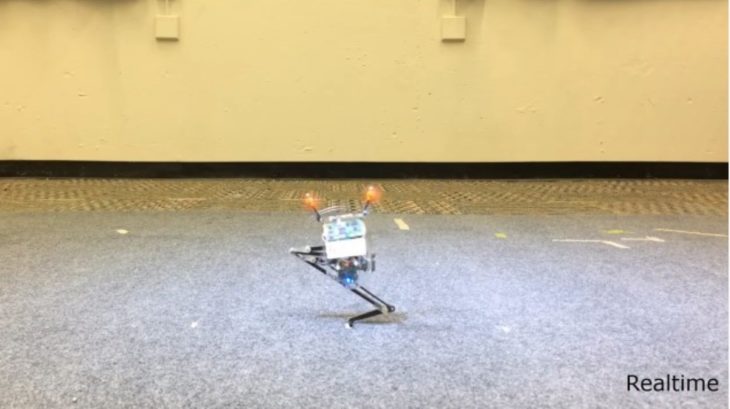
En esta ocasión el Laboratorio de Biomimetrica de la Universidad de Berkeley nos trae a Salto, un robot de una sola pierna construido en 2016 que, como su nombre indica, ha sido dotado con la capacidad para efectuar saltos dobles desde las paredes al mejor estilo parkour.
Llegado en el 2018, este robot había adquirido la habilidad suficiente para realizar saltos de hasta un metro de altura con una notable precisión, rebotando en los obstáculos de forma autónoma, usando incluso sillas para rebotar hacia una mesa.
No obstante, pese a estas capacidades, Salto aún presentaba dificultades para maniobrar en tierra ya que, si bien el robot puede mantener un jigger en movimiento de forma dinámica, cuando se trata de pegar un aterrizaje, esta acción representaba un desafío para el robot, tomando en cuenta también el hecho de contar con una sola pierna para desplazarse.
Es así como la velocidad angular aún era un obstáculo con el cual Salto debía lidiar, especialmente en situaciones donde intentara efectuar un salto hacia delante de un punto a otro.
En este sentido, el robot se inclinaba hacia delante, sustentado por una rueda de reacción giratoria para mantener el equilibrio en el que luego aplicaba un ajuste en la rotación de esa rueda de equilibrio para mover su pie hacia delante y colocarlo en un ángulo que le permitiera realizar un aterrizaje controlado. En caso de que su velocidad angular se encontrara apagada, este podría aterrizar su pie sin problema en el objetivo pero terminaría cayéndose.
El salto hacia la solución
La solución a esta problemática fue dada a conocer por Justin Yim, líder del equipo de desarrollo de Salto, durante una entrevista ofrecida al IEEE Spectrum.
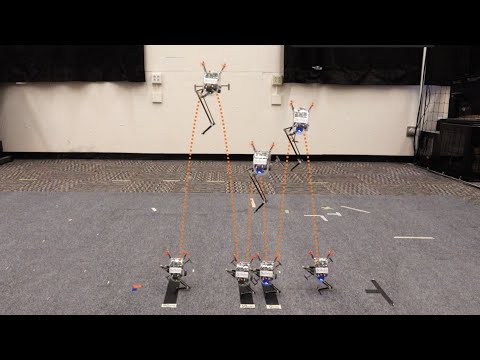
En ella Yim planteó una situación en la que si Salto cayera desde una altura de un metro tendría unos 2,3 grados de margen para maniobrar hacia delante y atrás para realizar su aterrizaje, algo muy similar a lo que experimentaría un gimnasta al momento de pegar un aterrizaje con sus pies juntos.
Si la velocidad angular esta mal aplicada es inevitable que deba darse un paso para obtener equilibrio.
No obstante, dar un paso con una sola pierna en estas condiciones resulta una tarea imposible, al igual que en una saliente o viga estrecha. Y es que, de la misma manera que una persona gira sus brazos al aterrizar en una viga cornisa, así también lo hace Salto girando su cola de reacción.
Gracias a esta característica Salto pudo realizar un aterrizaje perfectamente controlado 52 veces de un total de 60 saltos en los cuales fue puesta a prueba su precisión, logrando sentarse en su «talón» 5 veces y caerse solo 3 veces.
Estos resultados significan que Salto podría ser usado para cumplir el propósito principal fijado durante su construcción: participar en misiones de búsqueda y rescate para desplazarse por terrenos difíciles donde este pequeño robot podría resultar de gran utilidad para saltar sobre escombros, rocas y restos con mayor rapidez y seguridad que un ser humano.
En este vídeo podrás observar con mayor detalle la mecánica involucrada en el funcionamiento de Salto