
La cartografía batimétrica, que implica estudiar la profundidad y el terreno de cuerpos de agua como océanos, ríos y lagos, es una tarea crucial en muchas áreas de investigación relacionadas con el agua. Sin embargo, este proceso a menudo requiere de una tripulación de individuos y puede ser lento y laborioso.
Ahora, investigadores de la Universidad de Texas en El Paso, Estados Unidos, han desarrollado una solución innovadora: una embarcación totalmente autónoma capaz de llevar a cabo estudios batimétricos de forma eficiente y precisa.
Embarcación autónoma revoluciona la cartografía batimétrica de cuerpos de agua
El proyecto fue liderado por la Dra. Laura Álvarez, una destacada científica en el campo de los sistemas no tripulados para la ciencia de la Tierra. Consciente de la necesidad de simplificar el proceso de reconocimiento batimétrico, Álvarez inició el desarrollo de la embarcación hace varios años. Sin embargo, para perfeccionar y ajustar el sistema, necesitaba la colaboración de expertos adicionales.
Fue entonces cuando reclutó a Fernando Sotelo, un estudiante de maestría en ciencias e ingeniería eléctrica en la UTEP. Juntos, llevaron a cabo una serie de pruebas en diferentes ambientes, como los lagos Grindstone en Nuevo México y Elephant Butte, para refinar el diseño de la embarcación y garantizar su fiabilidad operativa.
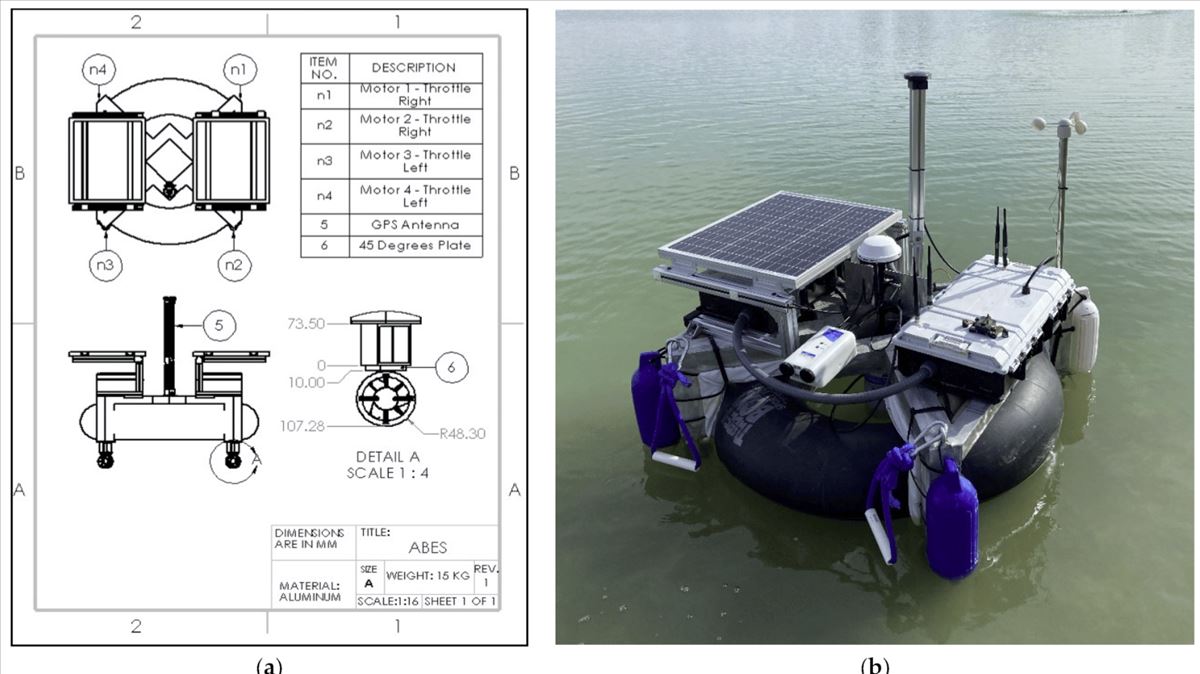
El resultado es un barco autónomo de aluminio, con una forma circular de 1 metro x 1 metro, equipado con cuatro propulsores que le permiten viajar hasta 1,5 metros por segundo y girar fácilmente 360 grados. Además, cuenta con un panel solar y una batería de litio que le otorgan una autonomía de hasta cuatro horas en un área de hasta 45 metros cuadrados. Esta combinación de características permite al barco llevar a cabo misiones de reconocimiento batimétrico de manera eficiente y precisa.
La nueva herramienta para estudios batimétricos de alta precisión
El sistema de cartografía batimétrica del barco utiliza un sonar de múltiples haces, que emite ondas hacia el fondo del cuerpo de agua. La profundidad del agua se calcula midiendo el tiempo que tarda la onda sonora en golpear el fondo marino y regresar al sistema de sonar. Además de la profundidad, el sonido reflejado proporciona información sobre el tipo de material presente en el fondo marino. Con esta tecnología, el barco puede generar mapas 2D y 3D de alta calidad del lecho marino.
El equipo de investigación realizó pruebas exitosas del barco en partes de Ascarate Lake en El Paso, Texas, y Grindstone Lake en Ruidoso, Nuevo México, demostrando la viabilidad y efectividad de su enfoque. Con el objetivo de promover la reproducción de esta tecnología, la Dra. Álvarez ha publicado instrucciones detalladas para construir una réplica del barco en línea, en su último artículo publicado en Sensors.
La próxima aplicación del barco será en un estudio del flujo y la profundidad del río Grande, que será realizado por la Dra. Álvarez este verano. Su objetivo es facilitar la investigación y el análisis de cuerpos de agua para comprender mejor su forma y su paisaje, lo cual es fundamental en numerosos campos, desde la gestión del agua hasta el estudio de los patrones de flujo.
La embarcación autónoma desarrollada por los investigadores de la UTEP representa un avance significativo en la cartografía batimétrica. Su capacidad para llevar a cabo estudios de manera autónoma y precisa tiene el potencial de revolucionar el campo de la investigación acuática y simplificar tareas que antes requerían de grandes equipos y recursos. Con este nuevo enfoque, se espera que los científicos puedan aprovechar al máximo su tiempo y recursos, lo que permitirá una mayor comprensión y conservación de los cuerpos de agua en nuestro planeta.