


Un equipo de investigadores de la Universidad de California en San Diego ha desarrollado un innovador modelo que mejora la percepción 3D de los robots cuadrúpedos, permitiéndoles navegar con soltura por terrenos más difíciles y diversos.
El Modelo: Traducción de 2D a 3D
El mecanismo principal del modelo se basa en una cámara de profundidad, situada en la cabeza del robot, la cual captura imágenes en dos dimensiones (2D) y las traduce en un espacio tridimensional (3D). En términos sencillos, esta cámara actúa como los «ojos» del robot, permitiéndole «ver» y comprender su entorno de manera más detallada y precisa.
Extracción de Información y Movimiento
Los datos obtenidos de las imágenes 2D se utilizan para extraer información en 3D, incluyendo aspectos como los movimientos de las patas del robot. Esta información se compara con la de fotogramas anteriores para calcular la transformación 3D entre el pasado y el presente, lo que, en esencia, otorga al robot una «memoria a corto plazo» de su entorno.
La Importancia de la Memoria a Corto Plazo
El uso de esta «memoria a corto plazo» es esencial para el control de los movimientos del robot. Le permite recordar lo que ha «visto» y las acciones que ha realizado anteriormente, utilizando esta información para planificar y ejecutar sus movimientos futuros.
La Versatilidad en los Entornos
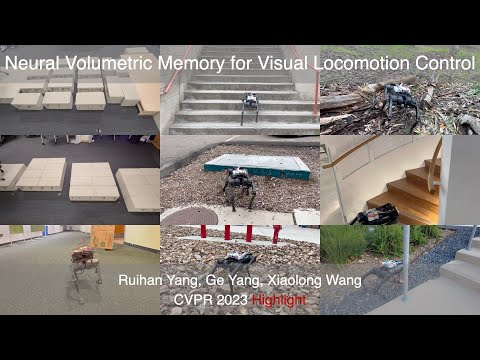
La mayor percepción en 3D, combinada con la propiocepción (sentido de movimiento y ubicación de las patas del robot), hace que el robot sea más versátil y capaz de navegar por terrenos que antes eran demasiado desafiantes, como escaleras y caminos rocosos.
Las Limitaciones y el Futuro
No obstante, el modelo aún tiene sus limitaciones. Actualmente, no guía al robot hacia un objetivo o destino específico. Sin embargo, el equipo de investigadores tiene planes para incluir más técnicas de planificación y completar el «pipeline» de navegación en trabajos futuros.
Este proyecto destaca por su innovación y potencial para abrir nuevos caminos en la interacción de los robots con su entorno. En un futuro, este avance podría tener implicaciones significativas para el desarrollo de la robótica, desde la exploración espacial hasta las tareas de rescate en zonas de desastre.
Tenéis más datos en rchalyang.github.io/NVM