

Entre las causas de discapacidad física de alta gravedad que se dan en la infancia, la parálisis cerebral figura como la más común.
Para recibir asistencia, la alternativa más común disponible es el uso de accesorios robóticos de movilidad, que brindan asistencia diaria a sus pacientes. Sin embargo, los robots tradicionales son rígidos e incómodos.
Una alternativa más cómoda para asistir el movimiento de niños con parálisis
Una alternativa diferente a las tradicionales, que se vale de materiales textiles suaves para construir su superficie, un nuevo proyecto busca facilitar el movimiento de las extremidades de una forma más natural y cómoda. Para su ejecución, esta iniciativa obtuvo una subvención de $1,5 millones de dólares de la Fundación Nacional de Ciencias estadounidense.
“Los materiales duros no interactúan bien con los humanos”, dijo Jonathan Realmuto, profesor asistente de ingeniería mecánica de la Universidad de California Riverside y líder del proyecto. “Lo que buscamos al usar materiales como el nailon y el elástico son esencialmente prendas robóticas”, agregó.
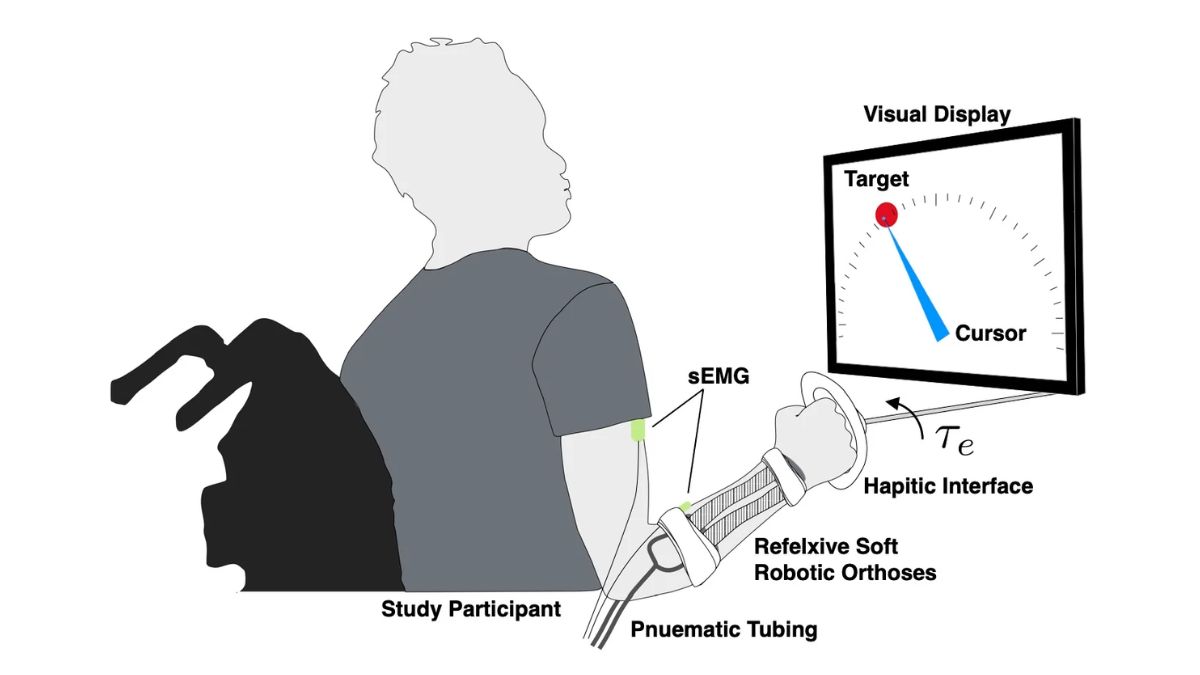
Las prendas señaladas por Realmuto contarán con áreas selladas y herméticas que pueden inflarse, para volverlas temporalmente rígidas y capaces de aportar fuerza para el movimiento. “Digamos que quieres flexionar el codo para hacer una flexión de bíceps. Podemos inyectar aire en vejigas especialmente diseñadas incrustadas en la tela que impulsarían el brazo hacia adelante”, explicó el investigador.
Un aspecto que hace más completa esta propuesta es que está siendo abordada desde lo integral que necesita ser esta solución. Además de desarrollar el hardware de este proyecto, el equipo está dedicado también al desarrollo de algoritmos que doten a esta “ropa robótica” con la capacidad de anticiparse a los movimientos que su portador desea ejecutar. “Uno de los desafíos críticos en la prestación de asistencia de movimientos es interpretar la intención de una persona. Queremos un «controlador voluntario», para que el robot se comporte en términos de lo que el humano quiere hacer», dijo Realmuto.
Para funcionar, según explican desde la UCR, dicho controlador se vale del uso de una serie de pequeños sensores dispuestos en las mangas, para detectar pequeños voltajes generados por los músculos cuando se contraen. Estos sensores proporcionarán los datos de voltaje en un algoritmo que será entrenado para extraer de ellos la intención de movimiento del usuario.
Este proyecto se está ejecutando en una clínica pediátrica de California, donde ya se están poniendo a prueba y refinando los prototipos, que han demostrado el impacto positivo que pueden generar. “Si podemos ayudar a los niños a cepillarse los dientes, verter agua o abrir puertas, acciones que otros dan por sentadas, es una gran victoria para ellos”, dijo Realmuto. “Pero también es una victoria para sus familias y cuidadores”, destacó.
El trabajo con pacientes pediátricos responde a la etapa inicial de este proyecto, que tiene la vocación de convertirse en una solución universal. De momento, tienen a su favor como avances satisfactorios el despliegue de su primera fase de prueba de prototipos y los bajos costos asociados al uso de textiles en lugar de piezas robóticas rígidas.