
Personal del Laboratorio Internacional de Biomecatrónica y Robótica energéticamente eficiente de la Universidad ITMO de San Petersburgo, Rusia, ha creado un prototipo de robot de salto de bajo consumo energético.
El diseño se basa en juntas flexibles y un actuador elástico en serie, con una serie de condiciones únicas que le permiten galopar.
Tecnología material para que un robot galope
Dos profesores universitarios de la Facultad de Sistemas de Control y Robótica, Kirill Nasonov y Dmitry Volyansky, bajo la dirección de Ivan Borisov, investigador de la Universidad ITMO, están trabajando en la creación de un robot galopante con características morfológicas únicas.
La tarea principal del equipo es desarrollar un diseño que sea elástico, energéticamente eficiente y al mismo tiempo, funcional. Para ello, se utilizan los principios de la biomimética y el cálculo morfológico. Según Ivan Borisov, el objetivo es crear un dispositivo que requiera un mínimo de esfuerzo de control, es decir, energía, y al mismo tiempo sea capaz de moverse sobre terrenos accidentados, superar obstáculos y que sea resistente a los daños físicos.
La eficiencia energética es la capacidad de utilizar eficientemente un presupuesto de electricidad limitado. Para ahorrar la fuerza de control de los motores eléctricos, es posible hacer un diseño de robot en el que la mayor parte de la dinámica requerida se deba a la mecánica, y la tarea del sistema de control se reducirá a estabilizar y complementar la dinámica del robot. Este principio de diseño se llama computación morfológica, en la que el «cálculo» de las leyes de control se implementa en mayor medida a nivel de mecánica, en lugar de a nivel de transformaciones algorítmicas. Debido a la distribución óptima de la masa, la elasticidad y la optimización de los parámetros de los mecanismos en los robots, es posible obtener la dinámica requerida y al mismo tiempo utilizar un menor número de motores, mientras que débilmente potente.
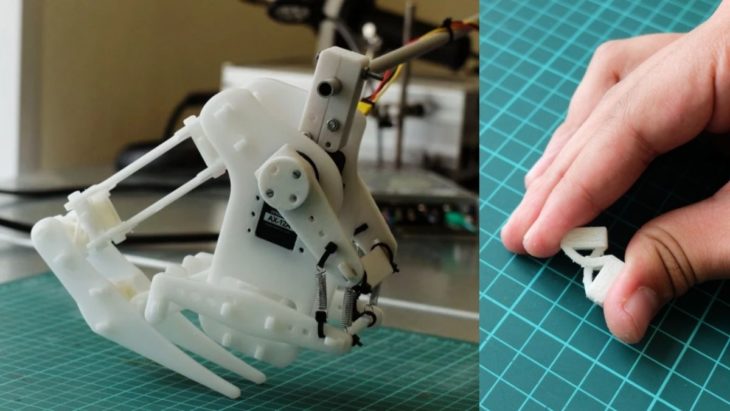
Además, para lograr una alta eficiencia energética, era necesario facilitar el cuerpo del robot tanto como sea posible – para deshacerse de los elementos estructurales pesados: engranajes, ejes metálicos y rodamientos. Para resolver el segundo problema, se aplicaron los resultados de una investigación de una universidad asociada a ITMO, la Universidad de Twente.
El robot de salto no es el producto final, sino más bien un objeto para probar los métodos de diseño morfológico, en particular, las articulaciones flexibles, antes de que dichos robots no estuvieran diseñados de esta manera. Además, el robot galopante es un buen ejemplo para estudiar los métodos de control y los sistemas dinámicos en su interacción con el entorno.
«Utilizamos motores con elasticidad secuencialmente unida e implementamos un método de control no por error de posición, sino por error de la energía potencial almacenada en el resorte. Los chicos terminan el primer año de la magistratura, y este es el resultado de su trabajo para el año. Pudieron probar en la práctica las habilidades de modelado innovador, métodos no estándar de control, diseño, producción de piezas, y también recibieron las habilidades de programación del controlador», dice Ivan Borisov.
En los planes futuros del equipo – para hacer un robot que no sólo salta en el lugar, pero se mueve completamente sobre terrenos difíciles. Para ello, es necesario sintetizar un mecanismo más complejo de la pierna, que será capaz de reconfigurar la trayectoria de movimiento.
El detalle de este avance presentado, puede ser consultado en el sitio web de la casa de estudios que encabeza esta investigación.