
Los expertos en robótica están acostumbrados a estudiar el movimiento y la estructura de los animales para realizar el diseño de sus nuevos dispositivos. Google no hizo nada diferente, pero el resultado llama la atención.
Usó el aprendizaje por imitación para enseñar a los robots autónomos cómo caminar, girar y moverse de manera más ágil.
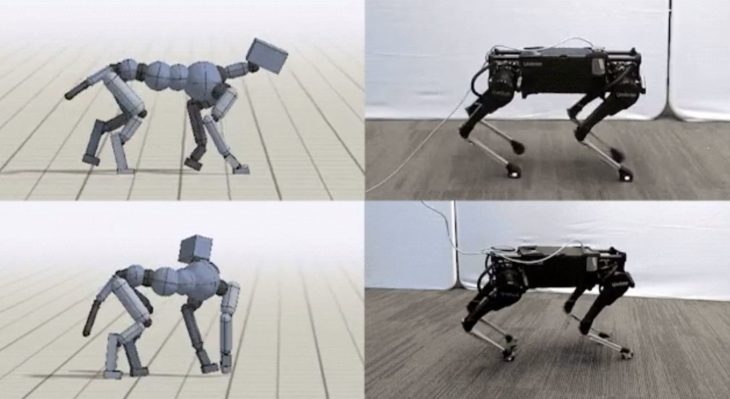
En el proceso usaron un conjunto de datos de captura de movimiento gracias a la instalación de varios sensores conectados a un perro. De esta forma «enseñaron» a un robot cuadrúpedo varios movimientos diferentes, difíciles de lograr con programación a mano tradicional.
Usaron los datos de movimiento del perro real para construir simulaciones de cada maniobra, incluyendo un trote de perro y un paso lateral, tal y como comentan en technologyreview. Luego combinaron las articulaciones clave del perro simulado y el robot para hacer que el robot simulado se mueva exactamente de la misma manera que el animal.

Con aprendizaje por refuerzo, aprendieron a estabilizar los movimientos y corregir las diferencias en la distribución y el diseño del peso.
Al implantarlo en el robot físico en el laboratorio tuvieron que corregir algunos movimientos, pero mucho del trabajo ya estaba hecho.
Enseñar a los robots los movimientos complejos y ágiles necesarios para navegar por el mundo real es un verdadero desafío, y con aprendizaje de imitación de este tipo podemos hacer que las máquinas aprendan más rápido y puedan llegar a sitios donde el ser humano no consigue, como en zonas de derrumbe, agujeros en cuevas y mucho más.
Aún así, hay desafíos por superar, ya que el peso del robot limita su capacidad de aprender ciertas maniobras, como grandes saltos o carreras rápidas. Además, capturar datos del sensor de movimiento de animales no siempre es posible, es caro y requiere la cooperación del animal (cuando es un perro no, pero un gran felino no colabora mucho).