
En lo que respecta al desarrollo de robots autónomos, la locomoción es uno de los aspectos que puede ser abordada de diferentes maneras por los desarrolladores, bien sea, a través de la instalación de piernas, ruedas, e inclusive, haciéndolos mover como oruga.
Pensando en la motricidad de las orugas fue como se llegó a la construcción del Robot Reconfigurable de Pista Continua (RCTR por sus siglas en ingles) desarrollado en la Universidad Ben Gurion de Israel.
Para la construcción del RCTR, David Zarrouk y su equipo, responsables del proyecto, optaron por la simplicidad, recurriendo al uso de la pista de rodadura como elemento predominante, implementando, además, 3 motores en el prototipo actual, pero con miras a cambiar esto en el futuro para que solo sean 2 motores los que sustenten la motricidad del robot.
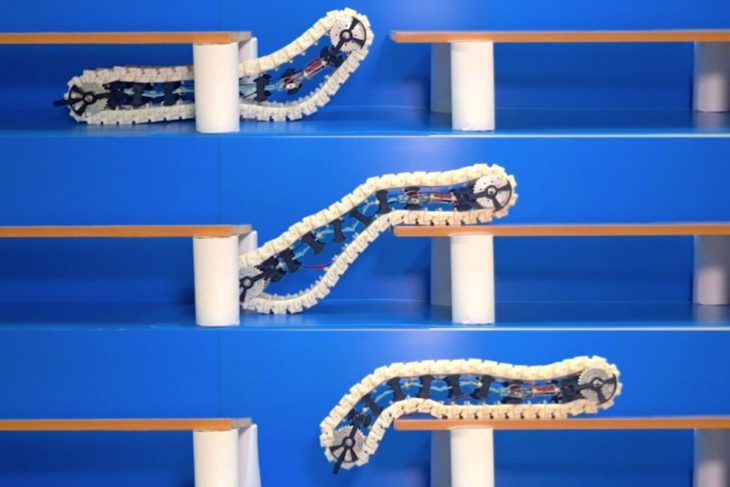
Cuando se pone en movimiento, los eslabones de la pista de rodadura continua pueden bloquearse para que la oruga se mantenga rígida o desbloquearse para dotarla de mayor flexibilidad, siendo que, al momento de encontrar un obstáculo, estos eslabones pueden bloquearse en un determinado ángulo para hacer que la parte delantera del robot se eleve.

Combinando ambas modalidades de bloqueo y desbloqueo los eslabones pueden brindar al RCTR la capacidad para saltar sobre un obstáculo bajo, de manera que no entre en contacto con él, así como también, flexionar su cuerpo para rodar sobre un terreno irregular o endurecerse para sortear un hueco presente en la superficie.
Gracias a esta funcionalidad, en el futuro, podría contemplarse la construcción de este tipo de robots para ser usado en operaciones de búsqueda y rescate, en donde seria de gran utilidad su flexibilidad para desplazarse por lugares de difícil acceso en caso de un siniestro sin tener la necesidad de realizar ajustes para que pueda superar los obstáculos que se le presenten.
Sin embargo, por ahora el RCTR solo puede desplazarse en línea recta, por lo que, aun deberán implementarse algunas mejoras en el prototipo para poder considerar la posibilidad de poner a prueba sus capacidades en un entorno real.
Para obtener más información detallada acerca del proyecto puedes hacerlo ingresando en el sitio web de IEEE Robotics and Automation Letters