
En lo que respecta al cubo de Rubik, este objeto no solo ha sido usado para poner a prueba las capacidades del ser humano, sino también para entrenar algunos robots, con el propósito de mejorar sus habilidades cognitivas y la manera en que estos procesan la información del entorno.
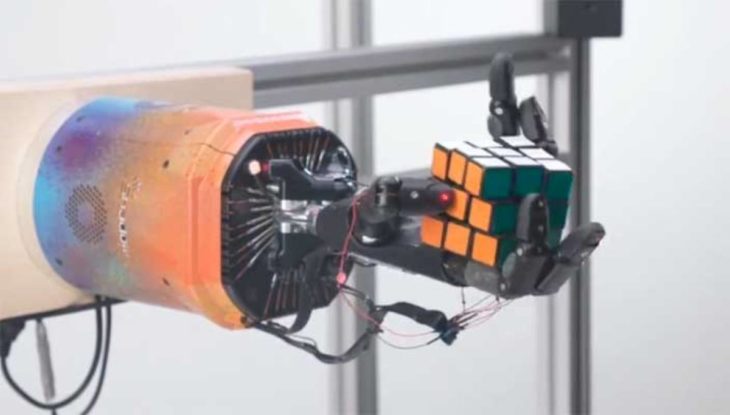
En este sentido, OpenAI, una empresa dedicada al desarrollo de inteligencia artificial, ha llevado a cabo una demostración con un brazo robótico, el cual, ha captado la atención por su capacidad para resolver un cubo de Rubik, sin asistencia de otro brazo.

Para lograr esta hazaña, los investigadores de OpenAI recurrieron al uso de redes neuronales en entornos simulados como método de inteligencia artificial, implantando en el brazo patrones de aprendizaje distintos a los algoritmos convencionales empleados por los speedcubers humanos.
Para ello, emplearon una red neuronal conocida como ADR (Automatic Domain Randomization) basada en movimientos aleatorios, así como el algoritmo de Kociemba para efectuar entrenamiento por refuerzo.
En mayo del 2017, tras numerosos análisis realizados y, tomando en cuenta aspectos como la física del cubo, la fricción y los sensores implantados en los dedos de la mana robótica, los investigadores decidieron poner en marcha su plan y comprobar los resultados de su proyecto.
Desde el primer intento, el comportamiento de la mano robótica había superado las expectativas de los investigadores resolviendo exitosamente el cubo de Rubik, incluso, colocándole un guante o un trozo de tela. Sin embargo, cuando se generan situaciones en las que el cubo es desordenado al azar, el brazo robótico solo puede resolverlo un 60% de las veces y, cuando está en extremo desordenado, solo un 20%.
Cada vez más es notable el avance que están teniendo los robots en el objetivo no solo de replicar el comportamiento humano, sino también de optimizar las acciones llevadas a cabo por este, siendo el cubo de Rubik una perfecta demostración de ello.