
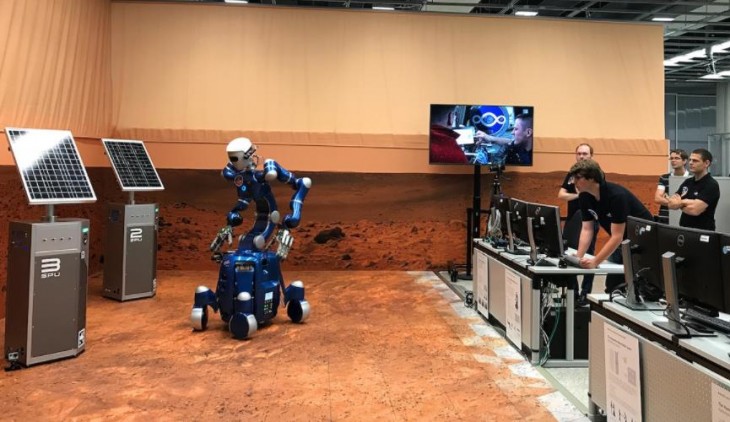
Hace pocas semanas se realizó una simulación donde se controló de forma remota un robot humanoide para inspeccionar y reparar una granja solar en un entorno simulado de Marte, una habitación en el Centro Aeroespacial Alemán, o DLR, en Oberpfaffenhofen, cerca de Munich.
El trabajo fue realizado por el astronauta de la Agencia Espacial Europea, Paolo Nespoli, quien controló al robot Justin para que hiciera tareas de navegación, mantenimiento y reparación. Se usó una tableta para emitir comandos de alto nivel al robot, pidiendo desde allí tanto la realización de movimientos como la toma de fotografías del terreno.
Comentan en ieee.org que esta «autonomía supervisada» ofrece una serie de ventajas sobre la autonomía total (en la que el robot intenta hacer todo por sí mismo) y la teleoperación directa (en la que el astronauta necesita controlar cada movimiento del robot). La autonomía supervisada permite mejor gestión de errores y límites inesperados, como retrasos en la comunicación.
Se aprovecha la inteligencia local del robot para razonar y planificar las tareas ordenadas, algo que mantiene al robot en un estado seguro para que pueda esperar los comentarios y el comando del astronauta.
El experimento, llamado SUPVIS Justin, es parte de un proyecto mayor cuyo objetivo es desarrollar capacidades avanzadas de colaboración entre humanos y robots. Quieren que, antes de aterrizar, en un planeta, los astronautas puedan enviar robots a la superficie para trabajar en la infraestructura necesaria. En el vídeo podéis ver los detalles:

De momento ya hay dos sesiones más de SUPVIS Justin programadas, donde se realizarán mejoras en la interfaz de usuario de la tableta, así como en las funcionalidades del robot.