Un nuevo tentáculo robótico suave para su uso en medicina
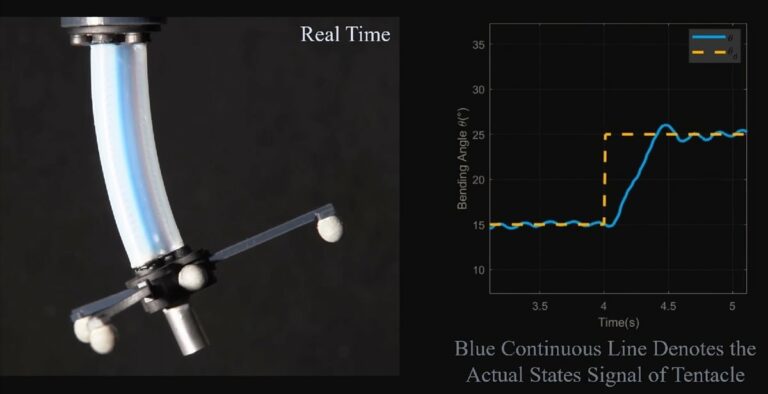
Los investigadores de la Universidad Tsinghua han desarrollado un tentáculo robótico suave que podría mejorar la eficiencia de algunos procedimientos médicos. El tentáculo es gestionado a través de un controlador de canal dual de entrada múltiple y salida múltiple basado en dos estrategias de control para el movimiento de doblado y oscilación, respectivamente, así como… Continúa leyendo »