Es normal que los científicos e ingenieros se inspiren en la naturaleza para desarrollar nuevo robots, es algo que vemos prácticamente a diario, pero no es normal ver cómo consiguen mejorar lo que la naturaleza ha conseguido durante millones de años de evolución.
Eso es de lo que presumen investigadores de la EPFL y de la UNIL, quienes han descubierto un sistema que permite andar de forma más rápida y eficiente, nunca observada en la naturaleza de forma natural, para los robots de seis patas que caminan sobre un terreno plano.
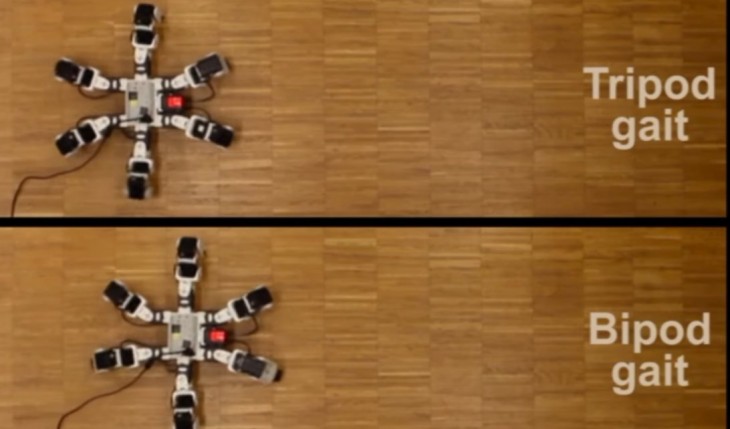
Cuando los vertebrados corren, sus piernas evitan al máximo el contacto con el suelo, pero los insectos son diferentes, usan tres patas en el suelo, dos en un lado y una en el otro, algo que ha inspirado durante mucho tiempo a los ingenieros que diseñan robots de seis patas. Eso ha cambiado.
Los investigadores han creado un nuevo sistema que es más efectivo siempre y cuando no tengan que usar las almohadillas adhesivas usadas para subir por paredes o andar por techos. Se trata de la marcha «bipod», ya lo han publicado en Nature Communications.
Para encontrar el nuevo sistema se usó un algoritmo de tipo evolutivo para optimizar la velocidad de caminar de un modelo de insecto. Vieron así que cuando solo dos patas están al mismo tiempo en el suelo, el robot es más rápido y eficiente, y lo demostraron construyendo un modelo y mostrándolo en vídeo:
Por otro lado examinaron insectos reales para ver si la adherencia de la pata juega un papel importante en la coordinación de caminar de moscas reales: pusieron gotas de polímero en las patas de las moscas para cubrir sus garras y almohadillas adhesivas, para eliminar la adherencia. Después de hacerlo, y pasado un tiempo, las moscas comenzaron a andar con dos patas en el suelo, tal y como hace la simulación, lo que demuestra que ellos saben bien lo que hacen: andan con tres patas por causa de la adherencia.